


集度披露“双激光雷达”方案:采用升降式设计,独立于视觉系统
【蜂耘网 激光光学】受到疫情对生活生产的影响,原定于北京车展亮相的集度首款汽车机器人,被迫延期到6月。但集度汽车仍在原定发布日的4月18日,通过线上沟通会披露了更多产品和研发细节,包括前向双激光雷达的具体布置方案、自动驾驶系统感知方案,以及最新的研发和落地进展。

集度智驾负责人王伟宝在沟通会上表示:SIMUCar(软件集成模拟样车)已迭代升级为2.0版本,其自动驾驶系统已加入激光雷达传感器,并与集度自研的高阶自动驾驶智能架构JET1.0(电子电气架构+SOA)实现融合。
可升降激光雷达布局
关于激光雷达,集度汽车此次通过汽车机器人测试车照片和其概念版的海报,展示了车头部位激光雷达的布置方案。图中所见的两个激光雷达,也是集度首款汽车机器人唯二的激光雷达,位于前舱盖的中央两侧,造型有些类似于上世纪热门的翻灯。

王伟宝也在沟通中正式确认,该激光雷达采用升降式方案,也就是说平时在不开启智能驾驶系统时,可以收纳至车内。但具体采用何种可动结构目前还不可知,集度方面表示详细方案将在6月份的ROBODAY活动上公布。
事实上,除了集度首款汽车机器人之外,已确定搭载同款激光雷达的路特斯Eletre,也采用了相同的设计方案。相比常规的固定布局,这样可以更有效地减少风阻、风噪,以及避免在非工作时间和恶劣路况下受损,但同时也对可动结构的可靠性、防尘性等提出更严格的要求。
前向双激光雷达互为冗余,FOV达到180°
集度在活动上也进一步公布了其感知方案信息,两个前向激光雷达都是来自禾赛科技的AT128。该雷达采用了半固态一维转镜方案,内部共有128个激光器,垂直方向可以同时发射128束激光进行扫描,单回波下每秒最大探测点数超153万,探测距离可达200m@10%,视场角(FOV)为120°x25.4°,角分辨率为0.1° (H)x0.2° (V)。

与市面上更多的二维扫描方案不同,一维转镜具备体积小、重量轻、电机负荷小等优势,激光发射器失效带来的数据风险也更小,但这同时意味着需要使用更多数量的激光器,对于成本和制造工艺也是一种挑战。

王伟宝表示,集度首款汽车机器人选择AT128,是考虑到量产周期、整体性能指标的综合结果。利用前向双激光雷达的布局,集度已实现了水平180°的FOV覆盖,因为左右两边拥有更宽的感知范围,将更便于识别鬼探头、横穿行人、被遮挡的障碍物等,有助于更好地处理corner case。
同时,由于两个激光雷达都可识别到车辆正前方60° FOV区域,该范围目标物上的点云数据也将加倍,识别准确率更高。这两个激光雷达还可互为安全冗余,实现比单激光雷达方案更好的可靠性。
感知仍以视觉为主,未来持续周更
与百度Apollo ANP不同的是,集度首款汽车机器人增加了其没有的激光雷达,而且采用了与视觉互为备份、相互补充的设计,是独立的双系统。两套智能驾驶方案既能高效自驱,也能高效协同。

但王伟宝向我们透露,集度前期更多还是将以百度Apollo的L4系统为基础,一方面是因为其内在的技术基础来自百度Apollo,另一方面是考虑到整体的系统安全,百度Apollo多年以来的路测、仿真验证,在安全性方面已经有了很好的保证。
王伟宝同时表示,尽管互为冗余,但集度在整个感知方案当中,仍将以视觉为主。根据集度在演示视频中透露的信息,首款汽车机器人前向至少有长距、中距、短距三个摄像头。

不过,首款汽车机器人落地之后,集度也将持续以周为单位的迭代速度,对智能驾驶系统能力进行补全。而在此之后的阶段,集度智能驾驶周更的重心将放在个性化升级、增加更广泛的应用场景等地方。
受制于法律法律,集度首款汽车机器人虽然脱胎于百度L4自动驾驶系统,要根据政策逐步开放功能。
王伟宝提到,集度整体的设计和硬件仍以L4能力为开发目标。在早期仅限于L2系统上路的阶段,集度除了要提供基于L4能力的体验外,还将通过语音、视觉等交互设计,让消费者更好地了解到系统的工作状态和运行逻辑,进而增加对系统的了解和信任。
SIMUCar 2.0已与JET1.0实现融合
此外,集度还公布了最新的研发进展。在今年2月底,集度SIMUCar 1.0已完成与集度智能架构JET1.0(电子电气架构+SOA)的融合适配。日前,SIMUCar已升级到2.0版本,相比1.0增加了激光雷达传感器,同时也与JET1.0实现了融合。

王伟宝表示,SIMUCar 1.0更专注于自动驾驶的基础能力建设,包括软件架构和相关基础功能逻辑的开发,并与底盘适配。而SIMUCar 2.0则是逐渐提升并形成基础能力的时期,该阶段的底层架构已升级包含电子电气架构EEA和整车操作系统SOA的JET,相关的域控制器、传感器,以及ADAS功能、泊车、智能交互等智能驾驶系统能力,也会逐渐达到量产状态。
其中,JET也是集度实现软硬件解耦、独立开发的另一核心。
王伟宝称,JET提供了整车需要的智能化相关电子电气架构设计,SIMUCar 1.0阶段就有98%的功能开发在基于JET开发,传感器布局也完全相同,这代表了系统功能和车辆的开发可以并行。
虽然这种模式在最后阶段也需要去跟真实的车辆做联调,但相比软件开发的工作量来说,比例已经很小。据王伟宝透露,集度的联调工作计划在今年年底开始进行。
活动最后,集度方面还向我们确认了最近流传的第二款车型信息,表示目前已启动了第二款量产车型的研发和预研工作,有望在今年年底的广州车展发布。
(蜂耘激光光学网 责任编辑:行云)
受到疫情对生活生产的影响,原定于北京车展亮相的集度首款汽车机器人,被迫延期到6月。但集度汽车仍在原定发布日的4月18日,通过线上沟通会披露了更多产品和研发细节,包括前向双激光雷达的具体布置方案、自动驾驶系统感知方案,以及最新的研发和落地进展。
- 2024-11-29
- 2024-11-29
- 2024-11-29
- 2024-11-29
- 2024-11-29
- 2024-11-29
-

抖音副总裁回应“电商去年广告收入4000亿元”:与事实严重不符
来源:红星新闻
11月29日消息,今日,针对近日“抖音电商去年GMV为2万多亿元,而广告收入高达4000亿元”的消息,抖音集团副总裁李亮在今日头条发文称该内容与事实严重不符。2024-11-29
-
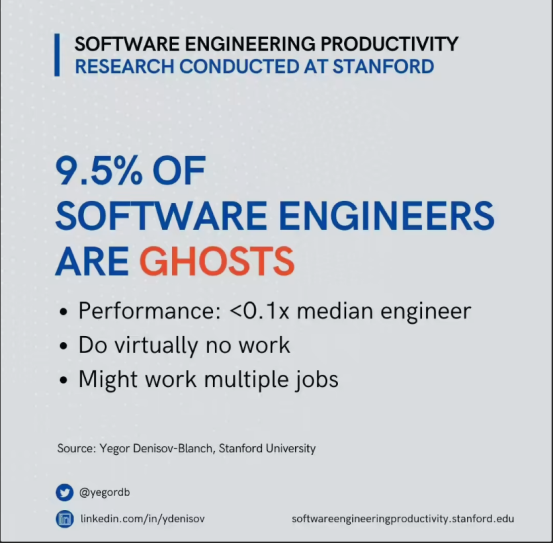
研究:约10%的程序员几乎什么都不做,却正常拿报酬
来源:IT之家
11 月 28 日消息,斯坦福大学对数百家公司的 50,000 多名软件工程师进行的一项研究发现,约 9.5% 的软件工程师属于“幽灵员工”。他们虽然在公司占着职位,但工作效率极低,不到平均水平的十分之一,几乎对团队没有任何实质性贡献,却依然领着全额薪水。2024-11-29


- 2022-08-25
- 2022-10-13
- 2022-10-24
- 2022-10-18
- 2022-09-30
- 2023-03-29
- 2022-10-25
- 2022-11-17
-
一文了解查理·芒格:为什么他是巴菲特最推崇的人
来源:
①巴菲特写道,“如果没有查理的灵感、智慧和参与,伯克希尔-哈撒韦公司不可能发展到今天的地位”;
②芒格曾表示,“如果世上未曾有过查理·芒格这个人,巴菲特的业绩依然会像现在这么漂亮 ”
③两周前,芒格还公开在节目中维护93岁的老友巴菲特。넶151 2023-11-29 -

面壁者,拉里·佩奇
来源:中欧商业评论
这两年,硅谷钢铁侠埃隆·马斯克在社交媒体上口无遮拦,这为他的公司引来了铺天盖地的负面新闻,然而,他的好友、谷歌联合创始人拉里·佩奇却因为看不到人同样被媒体炮轰多时。他已经在公共视野中消失太久了。넶269 2022-06-15 -

百岁中科院院士文圣常逝世!被誉为我国海浪研究的“点灯人”
来源:南方都市报
3月21日上午,中国海洋大学发布讣告,中国科学院院士、著名物理海洋学家、该校教授文圣常,因病医治无效,于3月20日15时37分在山东青岛逝世,享年101岁。넶305 2022-03-21



-

-

-

南京人工智能大会即将召开!汇聚业界智慧 共探AI无限可能
来源:蜂耘网
南京人工智能大会计划于6月27日在南京举行,大会以“产业变革,抓住机遇”为主题,共同探讨人工智能产业的最新技术、新的应用场景以及未来的发展趋势等问题。넶139 2024-06-18



- 2024-11-29
- 2024-11-29
- 2024-11-29
- 2024-11-29
- 2024-11-29
- 2024-11-29
- 2024-11-29
- 2024-11-29
- 2024-11-29
- 2024-11-29
- 2024-11-29
- 2024-11-29

